
Using MediaPipe with PD
In this section we will use MediaPipe in Python to control PD patches. More specifically, the computer vision part will detect our hands and sends their positions to synthesis parameters:

Signal flow for the CV -> sound synthesis exercise.
Make sure you have completed the Python and MediaPipe Setup before starting with this exercise.
Run Camera Tracking
Download the Python script and run it, after activating your virtual environment. You can get information on the program's arguments by typing:
The output lists all possible arguments:
Camera tracker (hands/head/body) -> OSC options: -h, --help show this help message and exit --mode {hands,head,body} Select tracker: hands,head,body --camera CAMERA v4l2 device index --width WIDTH default=1280 --height HEIGHT default=720 --ip IP default = 127.0.0.1 --port PORT default=9000 --flip horizontal mirror --draw show preview window --smooth SMOOTH EMA smoothing [0..1], 0=off --min_det MIN_DET min detection confidence --min_trk MIN_TRK min tracking confidence (hands)
For this excercise, we want to use hand-tracking, with additional parameters for smoothing the tracking results and drawing the markers:
The program will open a window to visualize the tracking in real time:
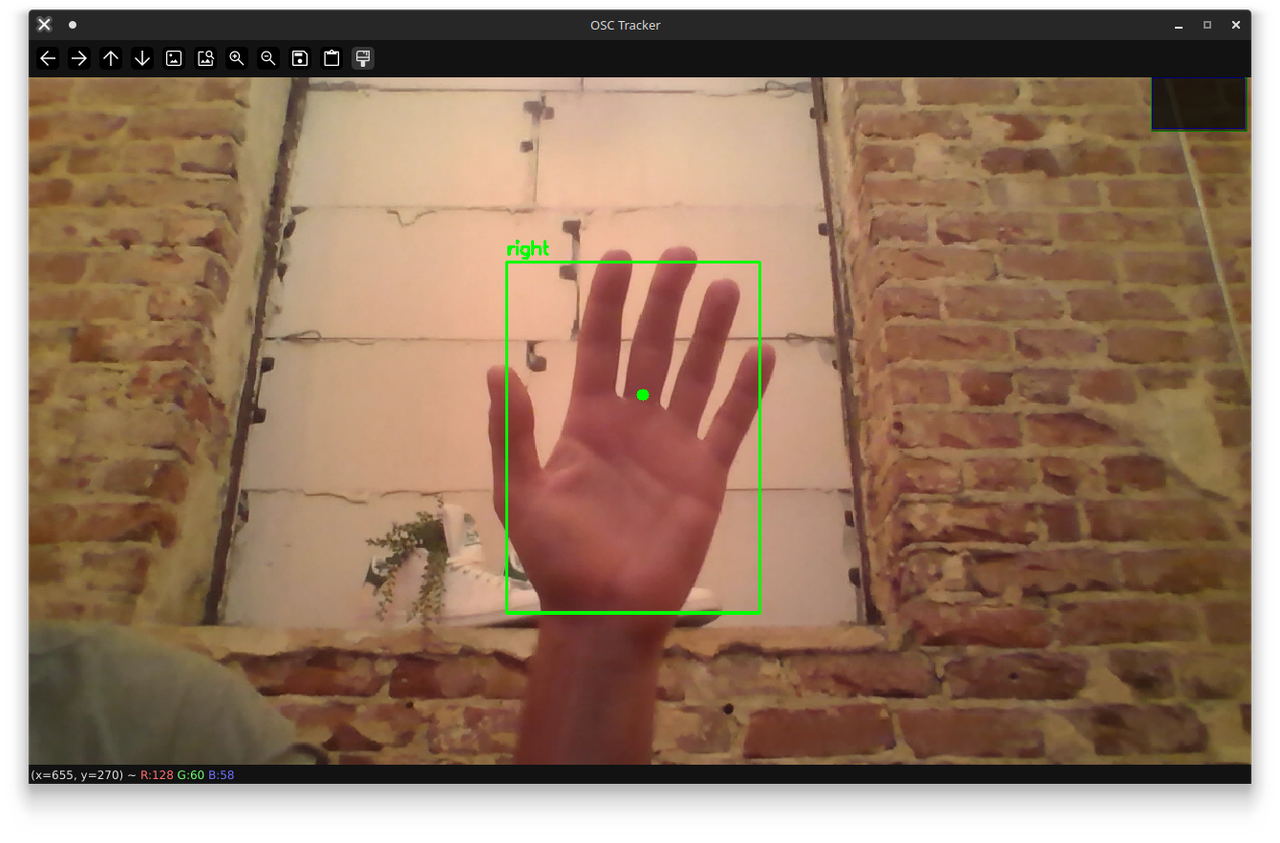
Hand-tracking result from Python.
With the default parameters for address and port, the program will send the tracking data to:
Address: 127.0.0.1
Port: 9000
Any program on that machine (localhost) opening this port can receive and process the information.
Run the PD Synth
Download the PD patch and launch it with Pure Data (install, if necessary: Getting Started with PD).
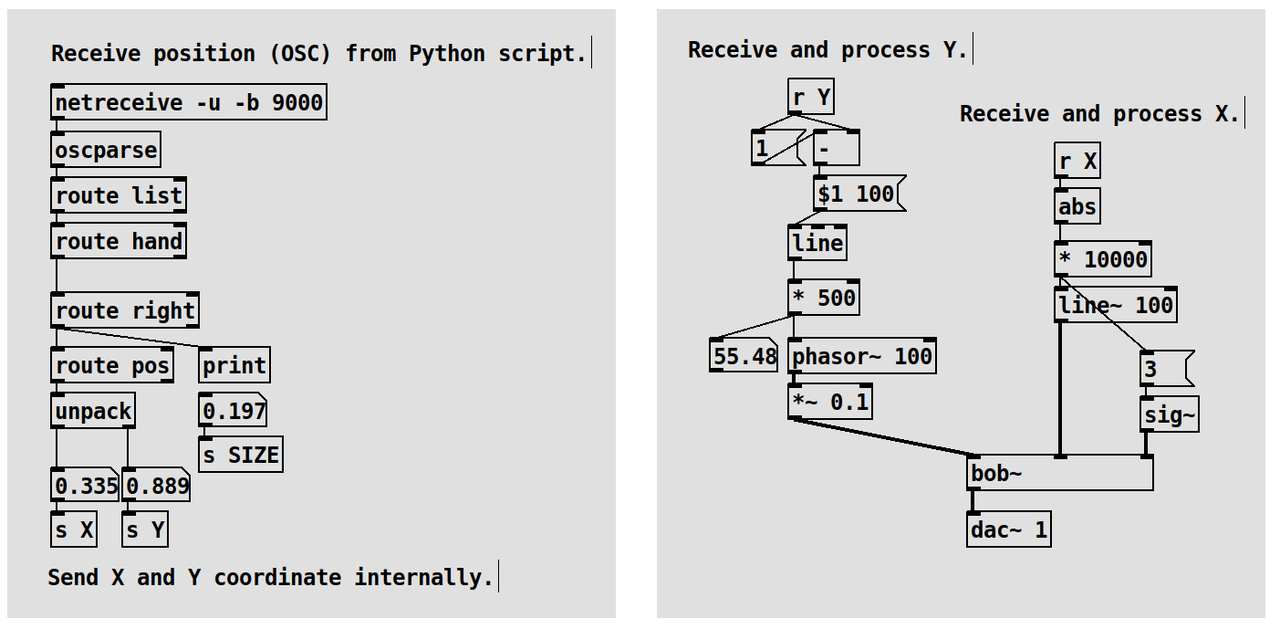
OSC-controlled Synth in PD.
The patch consist of two main sections:
- 1: OSC receiver and router
opens a UDP port
extracts the right hand data
sends position data (X,Y) internally
- 2: Synth
reveives position data (X,Y)
uses parameters for sound synthesis