Encoding Ambisonics Sources
The Virtual Source
The following example encodes a single monophonic audio signal to an Ambisonics source with two parameters:
Azimuth: the horizontal angle of incidence.
Elevation: the vertical angle of incidence.
Both angles are expressed in rad and range from \(-\pi\) to \(\pi\). Figure 1 shows a virtual sound source with these two parameters.
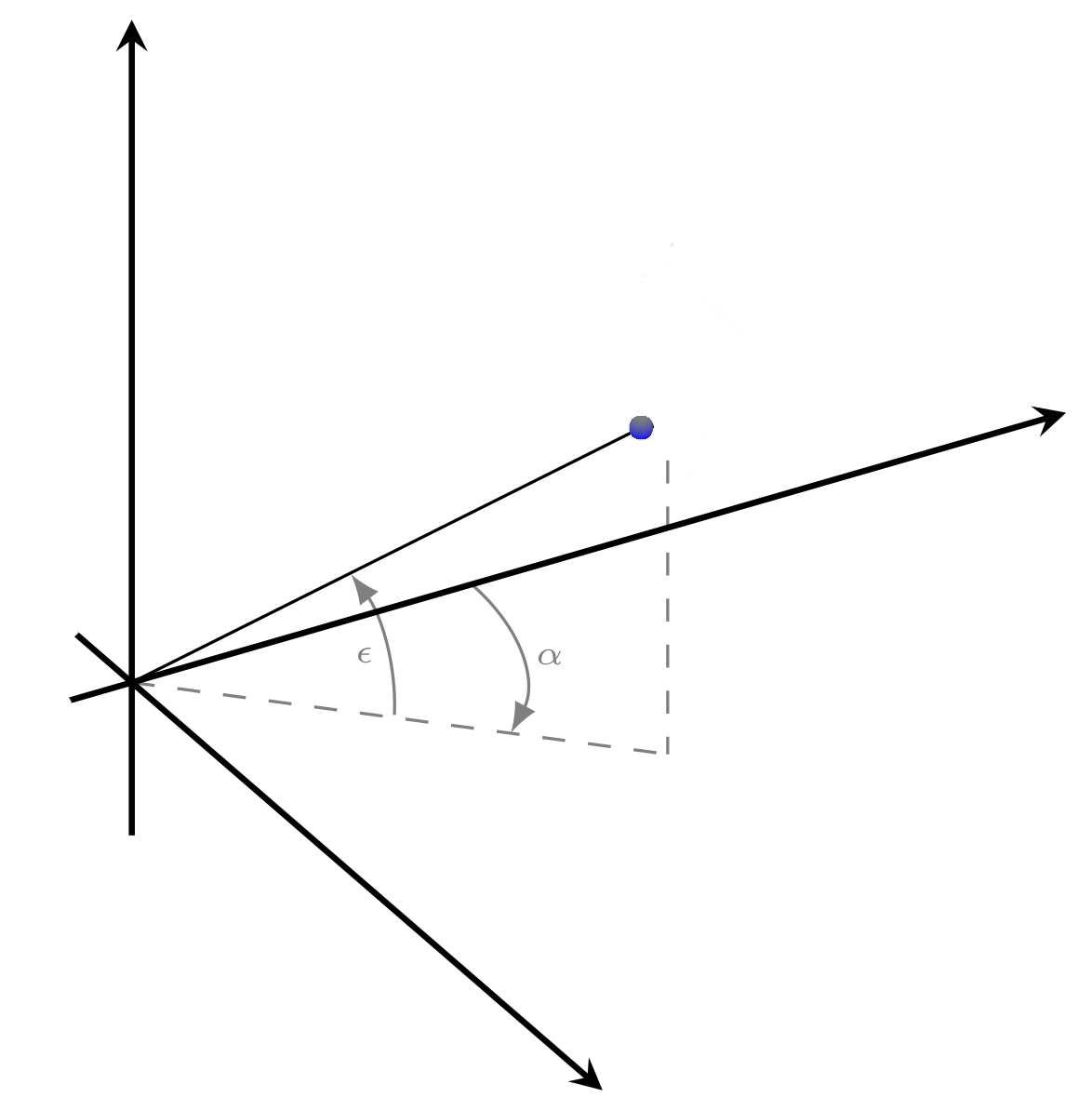
Figure 1: Virtual sound source with two angles (azimuth and elevation).
Encoding a 1st Order Source
The Ambisonics Bus
First thing to create is an audio rate bus for the encoded Ambisonics signal. The bus size depends on the Ambisonics order M, following the formula \(N = (M+1)^2\). For simplicity, this example uses first order:
s.boot; // create the Ambisonics mix bus ~order = 1; ~nHOA = (pow(~order+1,2)).asInteger; ~ambi_BUS = Bus.audio(s,~nHOA);
The channels of this bus correspond to the spherical harmonics. They encode the overall pressure and the distribution along the three basic dimensions. In the SC-HOA tools, Ambisonics channels are ordered according to the ACN convention and normalized with the N3D standard (Grond, 2017). The channels in the bus thus hold the three main axes in the following order:
Spherical Harmonic Index |
Channel |
Description |
|---|---|---|
1 |
W |
omnidirectional |
2 |
X |
left-right |
3 |
Z |
top-bottom |
4 |
Y |
front-rear |
The Encoder
The SC-HOA library includes different encoders. This example uses the HOASphericalHarmonics class.
This simple encoder can set the angles of incidence (azimuth, elevation) in spherical coordinates. Angles are controlled in radians:
azimuth = 0 with elevation=0 is a signal straight ahead
azimuth =-pi/2 is hard left
azimuth = pi/2 is hard right
azimuth = pi is in the back.
elevation = pi/2 is on the top
elevation = -pi/2 is on the bottom
This example uses a sawtooth signal as mono input and calculates the four Ambisonics channels.
~encoder_A = {arg azim=0, elev=0; Out.ar(~ambi_BUS,HOASphericalHarmonics.coefN3D(~order,azim,elev)*Saw.ar(140)); }.play;
The Ambisonics bus can be monitored and the angles of the source can be set, manually:
The Decoder
The SC-HOA library features default binaural impulse responses, which need to be loaded first:
Afterwards, a first order HOABinaural decoder is fed with the encoded Ambisonics signal. It needs to be placed after the encoder node to get an audible output to the left and right channels. This output is the actual binaural signal for headphone use.
Panning Multiple Sources
Working with multiple sources requires a dedicated encoder for each source. All encoded signals are subsequently routed to the same Ambisonics bus and a single decoder is used to create the binaural signal. The angles of all sources can be set, individually.
Exercises
References
2017
- Florian Grond and Pierre Lecomte.
Higher order ambisonics for supercollider.
In Linux audio conference 2017 proceedings. 2017.
[details] [BibTeX▼]